
最適化問題は、マーケティング予算配分の最適化、配送ルートの最適化、スケジュール最適化など、何かを最適化する問題を扱うものです。
最適化問題には、登場する数式や最適解の条件などによって、線形計画問題や非線形計画問題、混合整数計画問題などがあります。
基本となるのが、線形計画問題です。線形式しか登場しません。前回、PythonのPyomoライブラリーで解く方法について簡単に説明しました。
前回の例で登場した最適化問題は小規模のものでしたが、現実は変数や数式の数は数百、数千、数万になります。
その場合、今回のように1つ1つ数式を定義していくことは現実的ではありません。
例えば、数式の係数や変数の上限や下限の制約を、外部からデータとして取得し、設定することが多いです。
今回は、「行列とベクトルを使った線形計画問題」というお話しをします。前回と同じ最適化問題を扱います。
前回の復習です。
Contents [hide]
前回の復習
最適化の構成要素
最適化には3つの構成要素があります。
- 目的関数
- 変数
- 制約条件
「ある制約条件のもと目的関数を最適化(最大化 or 最小化)する変数を見つける」のが最適化問題です。
モデリングツールとソルバー
最適化問題を解くには、次の2つのツールが必要になります。
- モデリングツール;最適化問題を記述するためのツール
- ソルバー:記述された最適化問題を計算するためのツール
Pyomoは、モデリングツールです。
GLPK(GNU Linear Programming Kit)は、線形計画問題を解くための無料のソルバーです。
最適化問題のモデリングし解くまでの流れ
以下、最適化問題を解くまでの流れです。
- モデリング
- モデルのインスタンスの生成
- 変数の定義
- 目的関数の定義
- 制約条件の定義
- 最適化
- ソルバーの設定
- 最適化の実施
- 結果確認
非常にシンプルです。
最適化する問題(前回と同じ)
今回、最適化する問題です。
ベクトルや行列で表現すると、以下のようになります。
さらに、変数に幾つかの制約をつけた場合、どうなるのかを見ていきます。
今回は、変数への制約の付け方を、次の3パターンで設定し見ていきます。
- 変数に非負制約あり
- 変数に範囲制約あり
- 変数に整数制約と範囲制約あり
前回と異なるところ
目的関数や制約式の係数などを、行列およびベクトル(正確には、NumPyの配列(array))として与えられたとして、前回と同じ最適化問題を解いていきます。
NumPyの配列(array)として与えられたデータを、辞書(dictionary)へ変換し、Pyomoでモデリングします。
必要なモジュールの読み込み
先ずは、利用するモジュールを読み込みます。
以下、コードです。
import numpy as np import pyomo.environ as pyo from pyomo.opt import SolverFactory
データ(目的関数や制約式の係数など)
目的関数や制約式の係数などを、行列およびベクトル(正確には、NumPyの配列(array))として設定し、それを辞書(dictionary)へ変換します。
以下、コードです。
#
# 変数の数
#
I = 2
#
# データ(係数など)
#
## 目的変数の係数
a_data = np.array([75,125])
## 係数行列
t_data = np.array([[6, 3],
[5, 21]])
## ベクトル(各制約式の下限)
t0_data = np.array([38,29])
#
# 辞書(dictionary)へ変換
#
## 目的変数の係数
a = dict((i, a_data[i-1]) for i in range(1, I+1))
## 係数行列
t = dict(
((i, j), t_data[i-1][j-1])
for i in range(1, I+1)
for j in range(1, I+1)
)
## ベクトル(各制約式の下限)
t0 = dict((i, t0_data[i-1]) for i in range(1,I+1))
最適解の計算
変数に制約なし
先ず、モデリングです。
モデルのインスタンスを生成します。
以下、コードです。
model = pyo.ConcreteModel()
変数を定義します。2要素のベクトル
以下、コードです。
# 添字 model.I = pyo.Set(initialize=range(1, I+1)) # 変数 model.x = pyo.Var(model.I, within=pyo.Reals)
次の目的関数を定義します。
目的関数を数式として表現し関数として定義した後に、その関数を目的関数に設定します。
以下、コードです。
# 目的関数の数式の定義
def ObjRule(model):
return sum(a[i] * model.x[i] for i in model.I)
# 目的関数として設定
model.obj = pyo.Objective(rule = ObjRule,
sense = pyo.minimize)
次の2つの制約条件を定義します。
制約条件を数式として表現し関数として定義した後に、その関数を制約条件に設定します。
以下、コードです。
# 制約条件の数式の定義
def Construle(model, i):
return sum(t[i,j] * model.x[j] for j in model.I) >= t0[i]
# 制約条件として設定
model.eq = pyo.Constraint(model.I, rule = Construle)
モデリングが終了したので、ソルバーを設定し最適化します。
以下、コードです。
# 最適化
## ソルバーの設定
opt = pyo.SolverFactory('glpk')
## 最適化の実施
res = opt.solve(model)
結果を確認します。
以下、コードです。
print(model.display())
print('\n')
print('optimum value = ', model.obj())
print("x = ", model.x[:]())
以下、実行結果です。
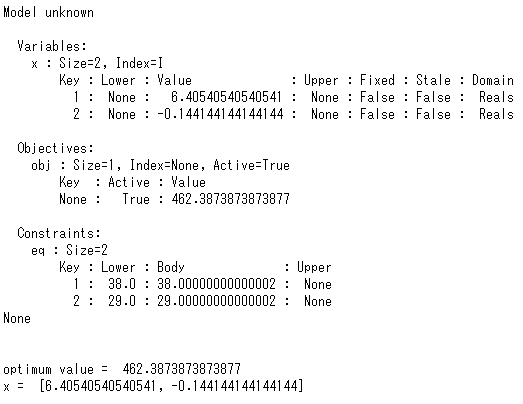
最適解は……
最適値(最小値)は……
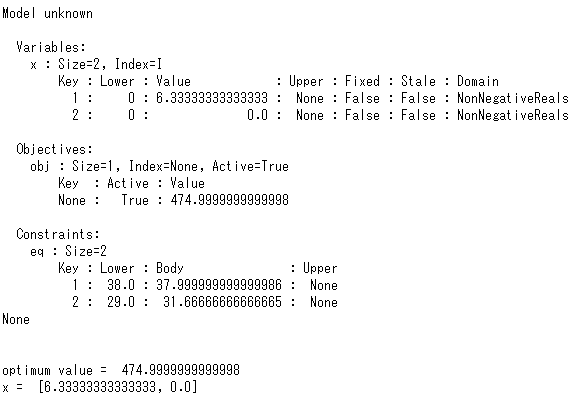
変数に非負制約あり
変数に非負制約をつけた場合です。
#
# モデルのインスタンスの生成
#
model = pyo.ConcreteModel()
#
# 変数の定義
#
# 添字
model.I = pyo.Set(initialize=range(1, I+1))
# 変数
model.x = pyo.Var(model.I, domain=pyo.NonNegativeReals)
#
# 目的関数
#
# 目的関数の数式の定義
def ObjRule(model):
return sum(a[i] * model.x[i] for i in model.I)
# 目的関数として設定
model.obj = pyo.Objective(rule = ObjRule,
sense = pyo.minimize)
#
# 制約条件
#
# 制約条件の数式の定義
def Construle(model, i):
return sum(t[i,j] * model.x[j] for j in model.I) >= t0[i]
# 制約条件として設定
model.eq1 = pyo.Constraint(model.I, rule = Construle)
#
# 最適化
#
# ソルバーの設定
opt = SolverFactory('glpk')
# 最適化の実施
res = opt.solve(model)
#
# 結果確認
#
print(model.display())
print('\n')
print('optimum value = ', model.obj())
print("x = ", model.x[:]())
以下、コードです。
以下、実行結果です。
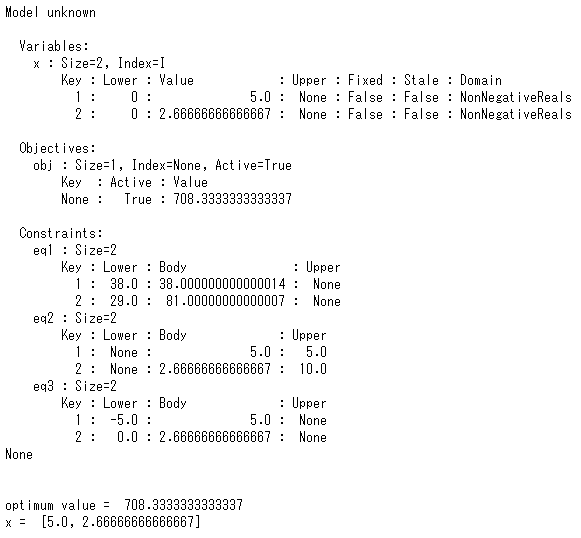
変数に範囲制約あり
変数の上限と下限のベクトルを設定します。こちらも、ベクトル(正確には、NumPyの配列(array))として設定し、それを辞書(dictionary)へ変換します。
以下、コードです。
# # 上限と下限のデータの追加 # # データ(係数など) ## 変数の上限 upper_data = np.array([5,10]) ## 変数の下限 lower_data = np.array([-5,0]) # 辞書(dictionary)へ変換 ## 変数の上限 upper = dict((i, upper_data[i-1]) for i in range(1,I+1)) ## 変数の下限 lower = dict((i, lower_data[i-1]) for i in range(1,I+1))
変数に範囲制約をつけた場合の、最適化モデルの生成と実行です。
以下、コードです。
#
# モデルのインスタンスの生成
#
model = pyo.ConcreteModel()
#
# 変数の定義
#
# 添字
model.I = pyo.Set(initialize=range(1, I+1))
# 変数
model.x = pyo.Var(model.I, domain=pyo.NonNegativeReals)
#
# 目的関数
#
# 目的関数の数式の定義
def ObjRule(model):
return sum(a[i] * model.x[i] for i in model.I)
# 目的関数として設定
model.obj = pyo.Objective(rule = ObjRule,
sense = pyo.minimize)
#
# 制約条件
#
# 制約1
def Construle1(model, i):
return sum(t[i,j] * model.x[j] for j in model.I) >= t0[i]
model.eq1 = pyo.Constraint(model.I, rule = Construle1)
# 制約2
def Construle2(model, i):
return model.x[i] <= upper[i]
model.eq2 = pyo.Constraint(model.I, rule = Construle2)
# 制約3
def Construle3(model, i):
return model.x[i] >= lower[i]
model.eq3 = pyo.Constraint(model.I, rule = Construle3)
#
# 最適化
#
# ソルバーの設定
opt = SolverFactory('glpk')
# 最適化の実施
res = opt.solve(model)
#
# 結果確認
#
print(model.display())
print('\n')
print('optimum value = ', model.obj())
print("x = ", model.x[:]())
以下、実行結果です。
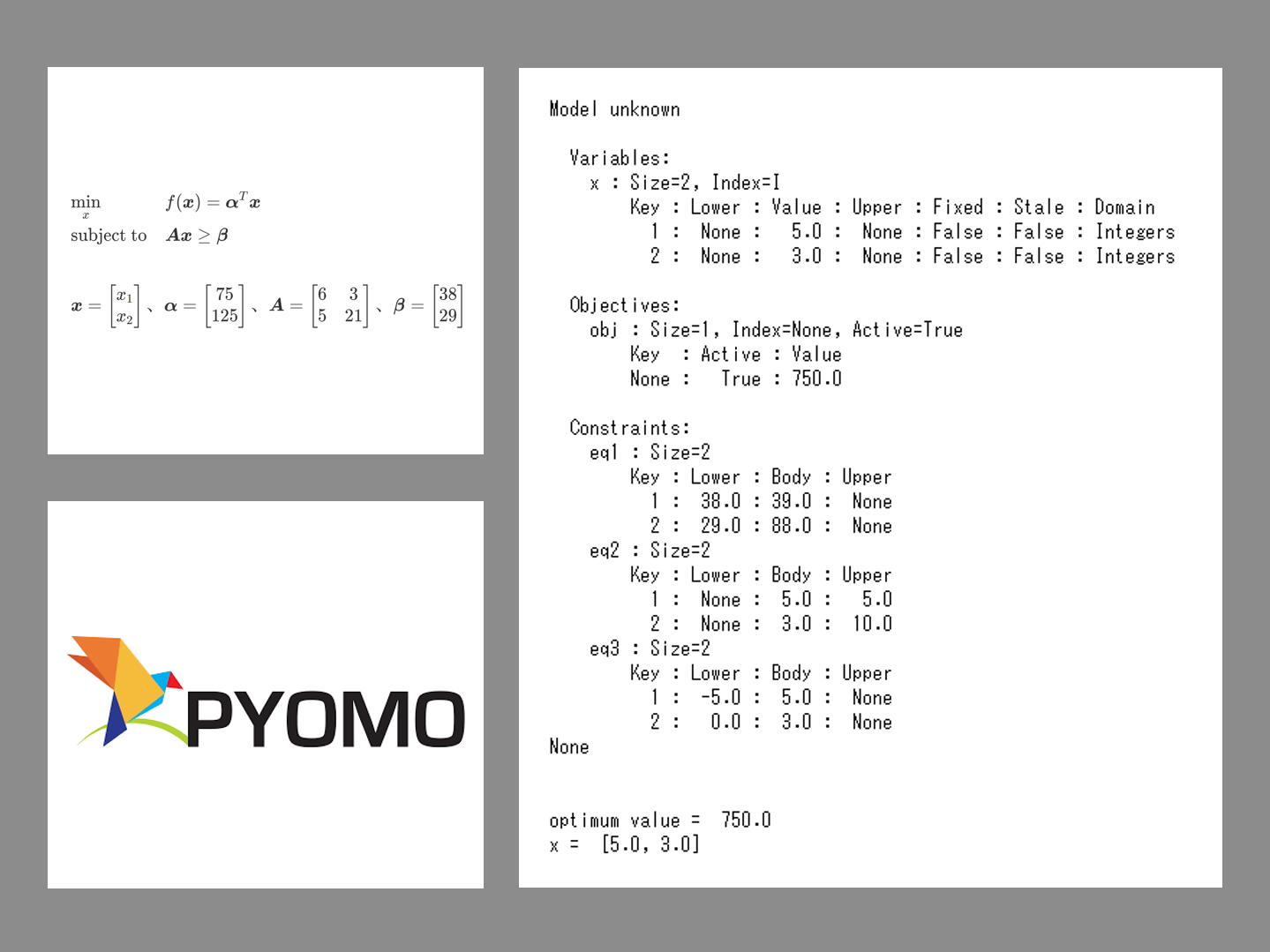
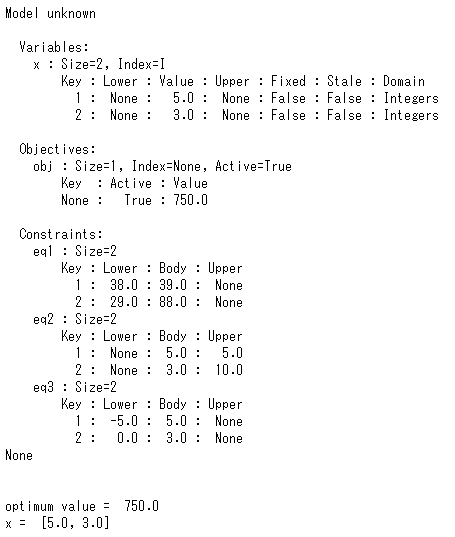
変数に整数制約と範囲制約あり
変数に整数制約と範囲制約をつけた場合です。
以下、コードです。
#
# モデルのインスタンスの生成
#
model = pyo.ConcreteModel()
#
# 変数の定義
#
# 添字
model.I = pyo.Set(initialize=range(1, I+1))
# 変数
model.x = pyo.Var(model.I, domain=pyo.Integers)
#
# 目的関数
#
# 目的関数の数式の定義
def ObjRule(model):
return sum(a[i] * model.x[i] for i in model.I)
# 目的関数として設定
model.obj = pyo.Objective(rule = ObjRule,
sense = pyo.minimize)
#
# 制約条件
#
# 制約1
def Construle1(model, i):
return sum(t[i,j] * model.x[j] for j in model.I) >= t0[i]
model.eq1 = pyo.Constraint(model.I, rule = Construle1)
# 制約2
def Construle2(model, i):
return model.x[i] <= upper[i]
model.eq2 = pyo.Constraint(model.I, rule = Construle2)
# 制約3
def Construle3(model, i):
return model.x[i] >= lower[i]
model.eq3 = pyo.Constraint(model.I, rule = Construle3)
#
# 最適化
#
# ソルバーの設定
opt = SolverFactory('glpk')
# 最適化の実施
res = opt.solve(model)
#
# 結果確認
#
print(model.display())
print('\n')
print('optimum value = ', model.obj())
print("x = ", model.x[:]())
以下、実行結果です。
まとめ
今回は、「行列とベクトルを使った線形計画問題」というお話しをしました。
前回と同じ、線形の最適化問題を扱いました。
しかし、ビジネス上の問題を定式化したとき、常に線形式で表現されるものではなく、非線形で表現されるケースの方が多いです。
次回は、「非線形計画問題」というお話しをします。